К оглавлению На предыдущую страницу
Создание новой РЛС дальнего обнаружения П-3
Постановление ГКО от 20
марта
1. Станции РУС-2 и РУС-2с были созданы для службы ВНОС. Однако опыт войны показал, что они несли не только службу раннего предупреждения о появлении самолетов противника в районах, прикрываемых с воздуха войсками ПВО, но и как станции наведения истребительной авиации ПВО, а в отдельных случаях боевой обстановки и как станции целеуказания ЗА.
2. Как станции наведения РУС-2 и РУС-2с должны были иметь более высокую точность определения координат и большие зоны действия.
3. Использование накопленного в первые годы войны опыта конструирования и производства станций подобного типа и назначения для повышения их эксплуатационной надежности и безотказности действия и создания больших удобств для обслуживающего персонала.
Тактико-технические требования, к этой станции многоцелевого тактического назначения: дальнее обнаружение (служба ВНОС), наведение ИА и целеуказание ЗА были разработаны НИИИС КА и утверждены командованием войсками ПВО страны. Ими предусматривались:
— дальность обнаружения
не менее
— точность определения азимута при обнаружении 4° и пеленгования 1,3°;
— точность определения
дальности —
— определение координат цели по азимуту от 0 до 360° и по углу места от 4 до 18°;
— время определения трех координат не более 25 с;
— длина волны
— мощность излучения в импульсе 80—100 кВт, длительность импульса 10—15 мкс.
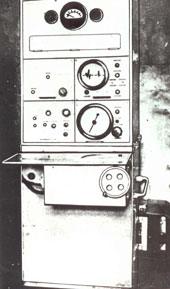
Приемно-индикаторный пульт станции П-3.
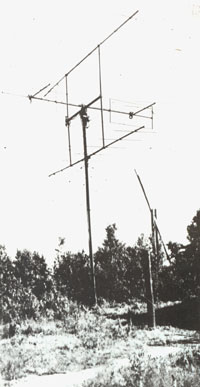
Антенная система станции дальнего радиообнаружения П-3.
Станция намечалась разборного типа с двумя антеннами: зондирующей и азимутальной.
НИИ радиопромышленности в
мае
Особенностью П-3 являлась ее антенная система, состоявшая из двух антенн: азимутальной, напряжение с которой поступало на выход приемника через антенный переключатель, и вертикальной, которая при посылке импульса работала от радиопередатчика, а в период паузы вместе с азимутальной антенной переключалась на прием.
Грубое определение азимута производилось обычным способом по максимуму амплитуды сигнала от антенны направленной на самолет. В режиме точного определения азимута за счет действия антенного переключателя и соединения между собой обеих частей азимутальной антенны в противофазе, при ориентировании системы на цель на экране отметчика были видны два раздвинутых по шкале импульса равной амплитуды; при уходе цели вправо или влево относительно оси антенны один импульс возрастал, а другой уменьшался, что давало оператору указание о необходимом вращении антенны для слежения за целью.
Для измерения угла места
использовалась система, состоявшая из двух антенн типа «волновой канал»,
установленных на разных высотах от поверхности земли (7 и
Угол места цели определялся по пропаданию сигналов в момент перемещения ползунка гониометра (нулевое излучение и прием). По данным точно определенной дальности и найденному углу места, с помощью специальной номограммы, построенной с учетом кривизны земной поверхности, определялась высота самолета. Управление характеристикой направленности антенн в вертикальной плоскости позволило не только определять высоту полета, но одновременно и устранять мертвые зоны наблюдения в достаточно широких пределах углов места. Одновременное использование гониометра как при передаче, так и при приеме позволяло вдвое повысить пеленгационную чувствительность РЛС.
НИИ успешно выполнил
разработку П-3 и в августе
1 С середины
Испытания станции П-3 на
НИЗАП ГАУ (инж. испытатель т. Опрышко Г. Г.), проведенные в январе — феврале
|
Характеристики |
РУС-2 („Редут") |
РУС-2с („Пегматит") |
П-2М |
П-3 |
|
Дальность
обнаружения самолета на высоте |
90—95 |
95—100 |
95—100 |
108 |
|
Предельная дальность обнаружения, км |
150 |
160 |
160 |
160 |
|
Точность определения дальности, м |
1000 |
1000 |
1000 |
850 |
|
Точность определения азимута, градусы |
2—3 |
2—3 |
2—3 |
1,3 |
|
Точность определения высоты (м) при углах места 3,5—4,5° 8—18° |
Не определяется Не определяется |
750 600 |
||
На основании этих
испытаний было рекомендовано выпускать станции П-3 взамен РУС-2 и РУС-2с [16].
НИЗАП ГАУ особо отметил в своем отчете простоту конструкции РЛС П-3, ее высокую
надежность в эксплуатации и отсутствие в обзорной диаграмме антенны мертвых зон
в вертикальной плоскости. В
* * *
Перечень моделей радиолокационных станций, созданных НИИ радиопромышленности в довоенный период и в годы войны свидетельствует о том, что этот институт был наиболее производительным коллективом среди других институтов и заводов нашей страны, работавших в области радиолокации.
Сочетая научные исследования с конструкторско-технологическими разработками новых образцов РЛС, институт добился выдающихся успехов как в серийном их выпуске своими силами, так и путем передачи технической документации на производство РЛС оборонным заводам.
Несмотря на тяжелые годы войны и эвакуацию на восток, институт, продолжая успешно вести исследовательские и опытно-конструкторские работы, стал основной базой серийного выпуска наземных станций РУС-2с («Пегматит» и П-2М), самолетных РЛС «Гнейс-2» и «Гнейс-2М» и корабельных станций «Гюйс», «Гюйс-1»,. «Гюйс-2М» и др.
За успехи, достигнутые в
развитии советской радиолокации, НИИ радиопромышленности в
В большом государственной важности деле ведущая роль принадлежала коммунистам института, его партийной организации и главному инженеру Н. Л. Попову и сменившему его вскоре талантливому и опытному инженеру А. А. Фину, который был не только крупным радиоспециалистом, но и смелым и требовательным руководителем, не боявшимся трудностей военного времени. Именно в бытность А. А. Фина главным инженером института, последний стал в условиях эвакуации мощным научно-инженерным коллективом, разрабатывавшим радиолокационную аппаратуру различного тактического назначения для войск ПВО, ВМФ и ВВС.

Н. Л. Попов.

А. А. Фин.
Большую помощь в выполнении поставок фронту, а также в организации ремонта сельхозтехники (тракторов, автомашин и др.) институту оказывал в эвакуации местный обком ВКП(б).
* * *
Во время войны по заданиям
НИИИС КА в УФТИ продолжали исследования, имевшие целью окончание разработки
совместно с НИИИС КА зенитной установки «Рубин», начатой в начале
В
Для решения второй части задачи, т. е. непрерывного определения координат, были исследованы схемы с применением антенной системы Эдкока, системы равносигнальных зон с механическим перемещением диполя в зеркале и системы равносигнальных зон по методу коммутации неподвижных антенн.
Однако отсутствие
производственно-технических возможностей, вызванных эвакуацией институтов на восток,
не позволило осуществить ни одну из опробованных систем. Поэтому разработчики и
их заказчики согласились смонтировать имевшуюся аппаратуру на двух автомашинах
и применить прежний метод определения координат. Эта работа была выполнена в
В полярную ночь с
морозами до 50° и сильнейшими ветрами и снегопадами станция «Рубин» три месяца
несла службу. Боевая эксплуатация станции позволила обстоятельно выяснить ее
тактические характеристики, которые оказались в пределах заданных требований.
Дальность обнаружения самолетов достигала
В научно-исследовательском отделе войск ПВО страны после изучения результатов опытной эксплуатации станции «Рубин» в районе Мурманска было сделано заключение, что, несмотря на вполне удовлетворительные основные характеристики станции по дальности и точности работы, примененный в ней метод определения координат не позволяет использовать ПУАЗО для ведения прицельного зенитного огня и дает ошибки. Поэтому серийное производство станций «Рубин» посчитали нецелесообразным.
* * *
Большую положительную роль в освоении отечественной и зарубежной радиолокационной техники для ЗА, внедрения ее в войска, передачи опыта боевого применения, выбора позиций для развертывания СОН, обучения нормам технической эксплуатации (профилактика, ремонт, настройка) имела небольшая по численности, но очень энергичная и квалифицированная группа молодых инженеров, состоявшая при командующем ЗА войск ПВО страны генерале А. Ф. Горохове. В эту группу входили Н. Н. Алексеев, Г. И. Свобода, К. Н. Трофимов, В. И. Калякин, В. Н. Кузнецов, В. М. Соболь, П. Н. Коваленко, Н. М. Каноныхин и А. Н. Волжин.
На следующую страницу К оглавлению